Анти-роботы – экзоскелеты, пилотируемые человеком

Эти механизмы можно также назвать экзоскелетами, поскольку могут увеличивать силу человека в 60-100 раз, правда в отличие от традиционных экзоскелетов они имеют гигантские размеры и вес. Последняя разработка, к примеру, обладает пятиметровыми габаритами, весит 4 тонны и вошла в Книгу рекордов Гиннесса, как самый большой четырех-опорный экзоскелет. Но анти-роботы не столько копируют скелет человека, сколько представляют собой транспортное средство — эдакий биомеханический динозавр или слон. Изобретатель планирует в будущем даже устраивать на них соревнования.
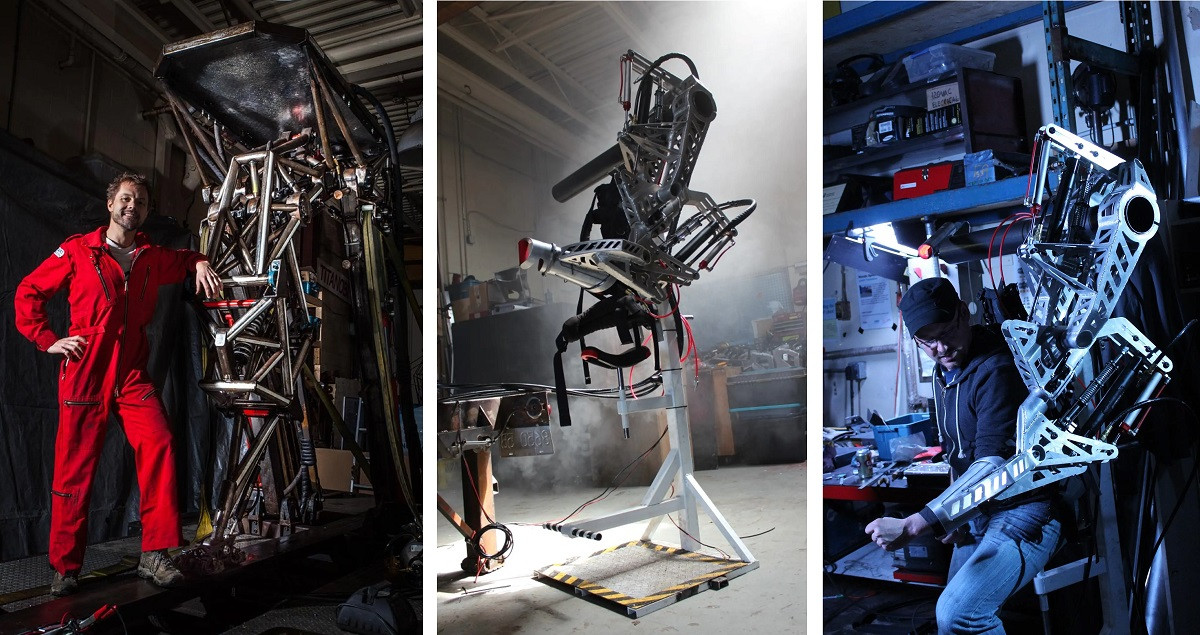
Ниже представлена фотогалерея, отражающая этапы разработки данной техно-бионики:
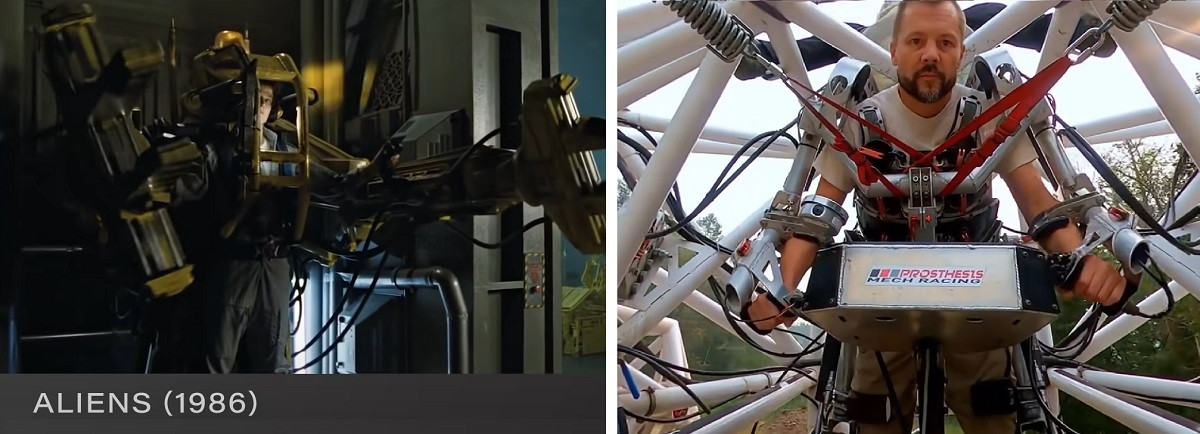
Более тридцати лет назад вдохновленный фильмом Джеймса Кэмерона «Чужие» Джонатан Типпетт начал создавать серию прототипов.
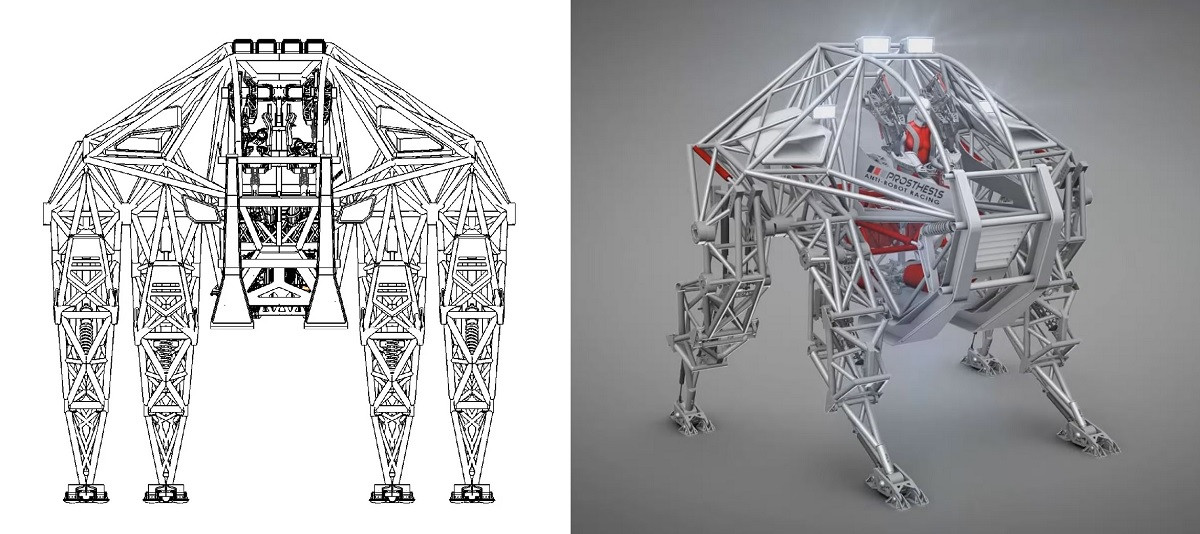
Первым из них стал гигантский восьминогий механический паук с электроприводом, который продемонстрировал возможности технологии. Затем появились тестовые устройства, на основе которых отрабатывались принципы обратной связи симбиоза человека и машины. Была создана также виртуальная модель анти-робота, показывающая направление дальнейшего развития конструкции и одновременно призванная привлечь инвесторов. Сейчас механизм выполнен в металле, но имеет несколько иную конструкцию. Габариты и вес машины (создатели называют ее Prosthes) были указаны в начале статьи. Другие характеристики выглядят следующим образом: • Пиковая мощность силовой установки: 150 кВт (200 л.с.) • Батарея: литий-ионный аккумулятор 96 В x 36 кВт⋅ч • Время работы: 15-60 минут • Кинематика: электрогидравлическая система с пневматическими амортизаторами; ход подвески — 50 см Управление требует от пилота использования всего тела. Экзоскелетный интерфейс или экзо-рама дают пилоту обратную связь, позволяя управлять механизмом на интуитивном уровне. Пилот на ощупь знает, какой вес приходится на каждую ногу. Со временем пилотам не нужно будет думать о том, где находятся ноги машины — управление будет примерно таким же, как на велосипеде или скейтборде. Пристегнувшись пятиточечным ремнем, пилот управляет механизмом руками и ногами и в некотором смысле сливается с машиной, становится с ней единым целым. Разработчики еще не реализовали идею гонок, но уже производят обучение пилотов и де-МОНСТР-ируют детище на шоу. Видео по теме. Материал подготовлен Московским заводом тепловой автоматики (МЗТА)